二/三次元机械手
连杆式机械手QF-L系列
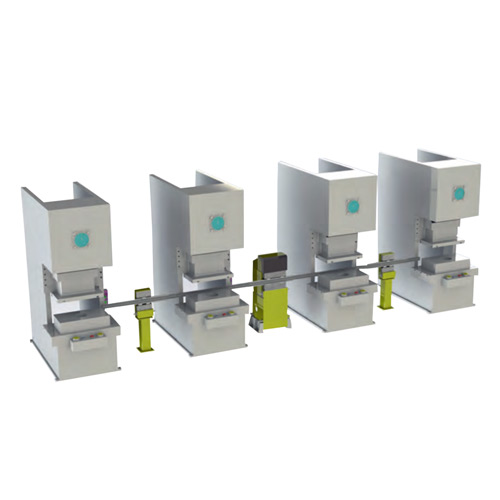
此种机械手可将多台小吨位冲床通过一根横杆连接成自动化生产线,淘汰了传统人工搬送模式,提高了生产效率,避免人工参与生产所产生的各种因素(包括效率慢、危险、误操作等)。一般由多台冲床+上料机(卷料机或片料机)1台+连杆式机械手1条+输送带1条(客户自备)组成一条自动化线。
此种机械手运动轨迹为两坐标(两轴),即左右移送方向和上下举升方向。驱动为2台日本进口三菱伺服电机,软件也为三菱控制系统。此种机械手分单本体和双本体式,主要是根据连接冲床的数量来确定。其中单本体适合于4台冲床连线,双本体适合于不大于8台冲床连线。拿取方式采用真空、电磁吸盘或夹爪方式;机械手可控制冲床联动或单动,程序都有设定;当任一方报警时都会停下来。传感器信号传输采用光纤方式,速度快、寿命长,不会被其他介质干扰,准确率高,重复定位精度为+02mm。每个手臂上都装有传感器检测装置。操作面盘配属有LCD人机界面(MMI,监控操作状态容易。
适用范围广泛,如电脑、TFT-LCD监视器、电子、家电、汽车、摩托车等各种金冲压件。
全国服务热线:
400-166-2658
电子邮箱:sales@qinfeng-gp.com
官方网站:www.hnlbjxs.com
| 型号 | QF-L1100/60 | QF-L1500/60 | QF-L1800/70 | QF-L2000/80 | |||||||
| 移动行程 (X轴) | 1100mm | 1500mm | 1800mm | 2000mm | |||||||
| 移送精度 | ±0.2mm | ±0.2mm | ±0.2mm | ±0.2mm | |||||||
| 举升行程(Z轴) | 60mm | 60mm | 70mm | 80mm | |||||||
| 取料方式 | 真空吸盘/电吸盘/夹爪 | ||||||||||
| 适用驱动 | 三菱伺服驱动 | ||||||||||
与机床、模具配合参数:
| 序号 | A | B | C | D | E | ||||||
| 名称 | 最大模具长度 | 最大产品长度 | 最小模具净开口 | 机械手最小通过空间 | 电箱高度 | ||||||
| 说明 | 大于180mm | 大于90mm | 当宽度与机械手干涉时 高度大于机械手本体高度 |
||||||||
| 备注 | 机械手通过的空间 | 喉深减上滑块宽度/2 | |||||||||
| 序号 | F | G | H | X | |||||||
| 名称 | 最小下模高度 | 模具避让机械手空间 | 机械手垂直行程 | 机械手水平行程 | |||||||
| 说明 | 大于120mm | 大于120mm | 60-80mm可选 | 约等于A+B | |||||||
| 备注 | 太低时传动轴与台面干涉 | 最大不超过2700mm | |||||||||
注释
1.移动产品重量最大5KG
2拿取方式吸盘/电磁或夹爪
3.效率=冲床-行程时间+机械手-行程时间